









01

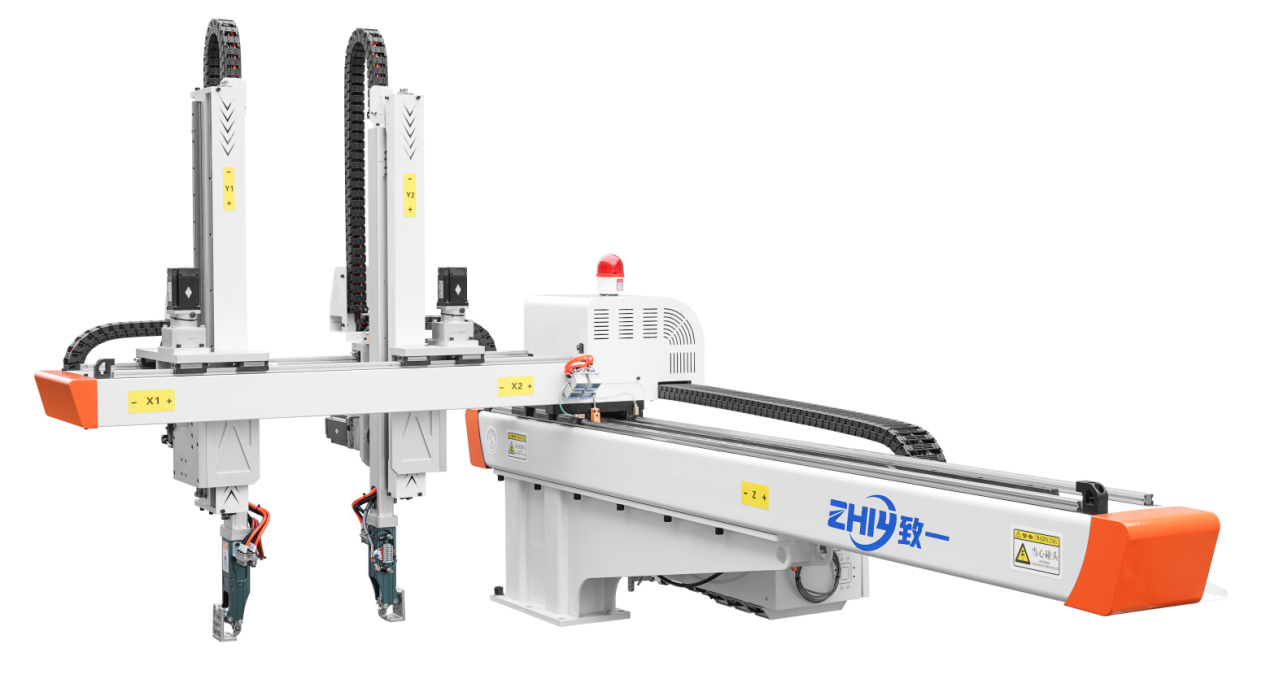
Inžeksion Kalyplama Maşynlary Robotlar 250-350T
Önümiň parametrleri
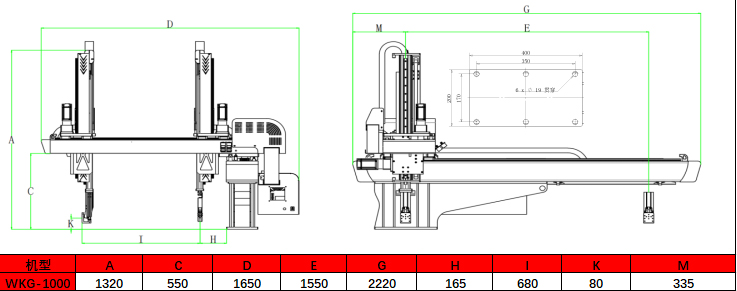
| Model | A | C | D | WE | G | H | Men | K | M | ||||||
| WKG-1000 | 1320-nji ýyl | 550 | 1650-nji ýyl | 1550-nji ýyl | 2220 | 165 | 680 | 80 | 335 | ||||||
| Model | Degişli inýeksiýa kalyplama maşyny (TON) | Ýokary we aşaky hereket (MM) | Öň we yzky hereket (MM) | Gorizontal hereket (MM) | Maşyn arassa agramy (KG) | Maksimum ýük (KG) | |||||||||
| WKG-1000 | 250T-350T | 1000 | 920 | 1700 | 295 | 8.-12. | |||||||||
Önümiň wideosy
Önümiň artykmaçlyklary
1. Ýokary takyklykly hereket gözegçiligi: Ösen serwo motor sürüji ulgamy robotyň çylşyrymly üç ölçegli giňişlik hereketlerinde örän ýokary ýerleşiş takyklygyny saklamagyny üpjün etmek üçin ulanylýar we ýalňyşlygyň örän kiçi aralykda dolandyrylýar, bu bolsa önümiň hiliniň durnuklylygyny netijeli ýokarlandyrýar.
2. Çalt jogap bermek we netijeli önümçilik: Optimallaşdyrylan hereket algoritmi ýokary tizlikli geçiriji enjam bilen utgaşdyrylýar, şonuň üçin robot "saýlap tap we ýerleşdir" hereketini çalt ýerine ýetirip, önümçilik siklini ep-esli gysgaldyp we uly möçberli önümçiligiň tizlik talaplaryna laýyk gelip bilýär.
3. Durnukly we ygtybarly mehaniki gurluş: Umumy çarçuwa ýokary berklikli alýumin ergininden we ýokary hilli polatdan ýasalýar. Takyk işlenişden we berk hil barlagyndan soň, ol ajaýyp ýük göterijilik ukybyna we deformasiýa garşy görkezijilere eýe bolup, ýokary intensiwli iş şertlerinde uzak möhletli durnukly işlemegi üpjün edýär.
4. Çeýe gurnama we sazlamak: Dürli markalaryň we modelleriň inýeksiýa kalyplama maşynlaryna aňsatlyk bilen uýgunlaşdyrylyp bilinýän birnäçe gurnama usullary işlenip düzüldi. Şol bir wagtyň özünde, ol akylly sazlamak ulgamy bilen üpjün edilen, bu bolsa işlemegi aňsat we enjamlaryň gurnama we sazlamak siklini ep-esli gysgaldýar.
5. Ynsanperwerleşdirilen işleýiş interfeýsi: Intuisiýaly we ulanmagy aňsat sensor ekran dolandyryş ulgamy bilen üpjün edilen, köp dilli işleýiş interfeýsini goldaýan bu ulgam dürli ýurtlardan we sebitlerden bolan operatorlar üçin çalt başlamak we parametrleri aňsatlyk bilen sazlamak we gözegçilik etmek üçin amatlydyr.
6. Akylly näsazlyklary anyklamak we irki duýduryş: gurlan akylly datçikler enjamyň iş ýagdaýyny real wagt režiminde gözegçilik edýär. Adaty bolmadyk ýagdaý ýüze çykan badyna, derrew signal berler we näsazlygyň ýerleşýän ýeri we sebäbi görkeziler, bu bolsa çalt tehniki hyzmat üçin amatlydyr we işlemeýän wagty azaldýar.
Dizaynyň esasy aýratynlyklary
1. Sadalaşdyrylan daşky görnüşiň dizaýny: diňe bir häzirki zaman senagat estetikasyna laýyk gelmek bilen çäklenmän, eýsem aerodinamikanyň ýörelgelerini hem göz öňünde tutýar, ýokary tizlikli hereket wagtynda howa garşylygyny netijeli azaldýar we arassalamak we saklamak aňsat, önümçilik gurşawyny arassa saklaýar.
2. Modul komponentleriniň dizaýny: Her bir komponentiň modul dizaýny diňe önümçilik prosesinde ýygnamagyň netijeliligini ýokarlandyrmak bilen çäklenmän, eýsem soňraky tehniki hyzmat we çalşyryş işlerini örän amatly edýär, tehniki hyzmat çykdajylaryny we işden çykma wagtyny ep-esli azaldýar.
3. Güýçli ölçekleniş: önümçilik liniýasynyň akylly täzelenmegini amala aşyrmak üçin hakyky önümçilik zerurlyklaryna laýyklykda wizual barlag ulgamlary we materiallary daşamak ulgamlary ýaly beýleki awtomatlaşdyrylan enjamlary goşmagy ýeňilleşdirmek üçin baý interfeýsler saklanýar.
Programma senariýleri
Awtomobil önümçiligi, elektron enjamlar, öý hojalyk harytlary, lukmançylyk enjamlary we ş.m. ýaly köp pudaklarda giňden ulanylýan bu manipulýator, uly awtoulag bamperleriniň, takyk elektron enjamlaryň korpuslarynyň ýa-da plastik gap-gaçlar, oýunjaklar we ş.m. ýaly kiçi gündelik zerur zatlaryň önümçiligi bolsun, inýeksiýa kalyplamasyndan soň ýygnamak, goýmak, üst-üste goýmak we ş.m. işlerini takyk we netijeli ýerine ýetirip, tutuş önümçilik prosesiniň awtomatlaşdyrma derejesini we önümçilik netijeliligini netijeli ýokarlandyryp biler.
Näme üçin bizi saýlaýarys
Tehnologiýa ylmy-barlag we işläp düzmeler






Zawod





010203040506070809101112131415
Köp soralýan soraglar
1. Bu robot 300T inýeksiýa kalyplama maşynlary üçin amatlymy?
Hawa, bu robot 250T-350T inýeksiýa kalyplama maşynlary üçin amatlydyr we 300T inýeksiýa kalyplama maşynlary onuň uýgunlaşma diapazonyna doly girýär. Onuň dizaýny bu tonna diapazonyndaky inýeksiýa kalyplama maşynlarynyň iş aýratynlyklaryny we giňişlik gurluşyny doly göz öňünde tutýar. Ol göteriji diapazon, hereket traýektoriýasy ýa-da ýük göterijiligi bolsun, ol 300T inýeksiýa kalyplama maşynyna doly gabat gelip, önümçilik prosesinde dürli işleriň netijeli we durnukly ýerine ýetirilmegini üpjün edip biler.
2. Gurnamak we näsazlyklary düzetmek näçe wagt alýar?
Robotymyz modul dizaýny we akylly sazlama ulgamy sebäpli gurnama we sazlama prosesi örän ýönekeý we netijelidir. Standart iş şertlerinde, adatça, professional tehnikler tarapyndan 1-2 günüň dowamynda tamamlanyp bilner. Sazlama prosesinde diňe ulanyş gollanmasyny ädimme-ädim ýerine ýetirmeli, degişli parametrleri sensor ekran arkaly sazlamaly we robot awtomatiki usulda kalibrläp we synagdan geçirip biler, bu bolsa enjam ulanylmazdan öň taýýarlyk wagtyny ep-esli gysgaldýar we netijeli önümçiligi çalt başlamaga kömek edýär.
3. Kepillik hyzmaty berilýärmi?
Biz bu robot üçin 12 aýlyk kepillik hyzmatyny hödürleýäris. Kepillik möhletinde, enjamda adam hilinden başga meseleler ýüze çyksa, degişli bölekleri mugt abatlap ýa-da çalşyp bereris. Şol bir wagtyň özünde, biz ömürboýy tehniki goldaw hyzmatlaryny hem hödürleýäris. Kepillik möhletinden soň hem, islendik wagt professional satuwdan soňky toparymyz bilen habarlaşyp bilersiňiz. Enjamlaryňyzyň hemişe iň gowy iş ýagdaýyny saklamagyny üpjün etmek üçin mümkin boldugyça çalt jogap bereris we ýokary hilli abatlaýyş we tehniki hyzmat hyzmatlaryny hödürläris.
4. Gündelik tehniki hyzmaty nähili ýerine ýetirmeli?
Gündelik tehniki hyzmat etmek örän ýönekeý. Ilki bilen, her ulanmazdan öň, mehaniki gurluşyň durnuklylygyny üpjün etmek üçin manipulýatoryň dürli birikdiriji bölekleriniň boltlarynyň berkdigini barlaň. Ikinjiden, sürtülmäni we aşynmany azaltmak we enjamyň hyzmat möhletini uzaltmak üçin manipulýatoryň ýollaryny, wintlerini we beýleki hereketlenýän böleklerini yzygiderli (hepdede bir gezek maslahat berilýär) arassalap we ýaglap duruň. Mundan başga-da, elektrik birikmesiniň berkdigini we boşluk we gysga zynjyr ýaly adatdan daşary ýagdaýlaryň bardygyny yzygiderli barlamak zerurdyr. Bu ýönekeý gündelik tehniki hyzmat çäreleri arkaly manipulýatoryň işini we ygtybarlylygyny netijeli kepillendirip bolýar we näsazlyk ähtimallygyny azaldyp bolýar.
5. Ony öz islegiňize görä üýtgedip bolýarmy?
Biz belli bir derejede ýöriteleşdirilen önümçiligi goldaýarys. Eger robotyň hereket aralygy, ýük göterijiligi, daşky görnüşiniň reňki ýa-da beýleki funksiýalary üçin ýörite talaplaryňyz bar bolsa, sargyt bermezden öň satuw toparymyz bilen jikme-jik habarlaşyň. Biz siziň aýratyn zerurlyklaryňyza laýyklykda baha bermek we dizaýn etmek üçin professional ylmy-barlag we işläp düzmek toparyny gurarys we size özboluşly önümçilik zerurlyklaryňyzy kanagatlandyrmak üçin iň amatly ýöriteleşdirilen çözgüdi hödürläris.